焊接機器人有什么不同?區別在這
發布日期:2019-05-17 09:51 ????瀏覽量:
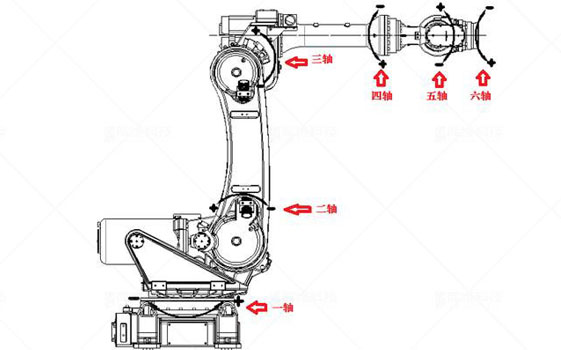
其中,1、2、3軸可將末端工具送到不同的空間位置,而4、5、6軸解決工具姿態的不同要求。
一種為平行四邊形結構,
一種為側置式(擺式)結構,側置式(擺式)結構
主要優點是上、下臂的活動范圍大,使機器人的工作空間幾乎能達一個球體。
因此,這種設備可倒掛在機架上工作,以節省占地面積,方便地面物件的流動。
但是這種側置式,2、3軸為懸臂結構,降低機器人的剛度,一般適用于負載較小的機器人,用于電弧焊、切割或噴涂。
平行四邊形機器人其上臂是通過一根拉桿驅動的。
拉桿與下臂組成一個平行四邊形的兩條邊。
故而得名。早期開發的平行四邊形機器人工作空間比較小(局限于機器人的前部),難以倒掛工作。
但80年代后期以來開發的新型平行四邊形機器人(平行機器人),已能把工作空間擴大到機器人的頂部、背部及底部,又沒有測置式的剛度問題,從而得到普遍的重視。這種結構不僅適合于輕型也適合于重型機。
相關文章
T/CWAN 0042—2020 《藥芯焊絲制備工藝及質量評價規范》團體標準宣貫會成功召開

采購9000臺機器人,王傳福重走富士康“老路”?董明珠給予了肯定

新技術脈沖,節卡機器人長板優勢明顯,創新為市場帶來新可能

工信部:工業機器人供不應求 訂單迎來爆發式增長
工業機器人年產量達36.6萬臺
自動化生產線焊接機器人編程技巧總結
為什么焊接機器人對焊絲要有要求?

自動化焊接機器人保障工件質量3部曲

銷量第一!石頭科技全球高端掃地機器人市場一枝獨秀