工業機器KRC4 KPP :庫卡配電箱 (KPP) 是驅動電源,可從三相電網中生成整流中間回路電壓. 利用該中間回路電壓可給內置驅動調節器和外置驅動裝置供電.有 4 種規格相同的設備變型.KPP 上設有顯示工作狀態的 LED 指示燈.
工業機器KRC4 KPP 的變型:
1 KPP 不帶軸伺服系統 (KPP 600-20)
2 KPP 帶單軸伺服系統 (KPP 600-20-1x40)
輸出端峰值電流 1x40 A
3 KPP 帶單軸伺服系統 (KPP 600-20-1x64)
輸出端峰值電流 1x64 A
4 KPP 帶雙軸伺服系統 (KPP 600-20-1x40)
輸出端峰值電流 2x40 A
工業機器KRC4控制電箱的功能
1 KPP 復合運行中的中央交流電源接口
2 饋電壓為 400 V 時的設備功率: 14 kW
3 額定電流: 25 A DC
4 接通和關斷電源電壓
5 用直流中間回路為多個軸伺服系統供電
6 帶外部鎮流電阻接口的集成制動斬波器
7 鎮流電阻的過載監控
8 通過短路制動使同步伺服電機停止運轉
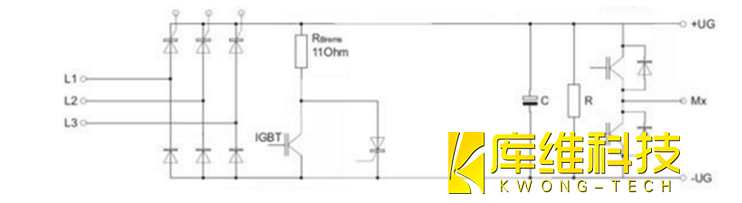
工業機器KRC4 KPP 原理電路圖如下:
帶雙軸伺服系統的 KPP 連接如下圖:

LED 指示燈診斷
工業機器KRC4 KPP 的 LED 顯示由以下 LED 組構成:
1 供電
2 KPP 設備狀態
3 軸調節器
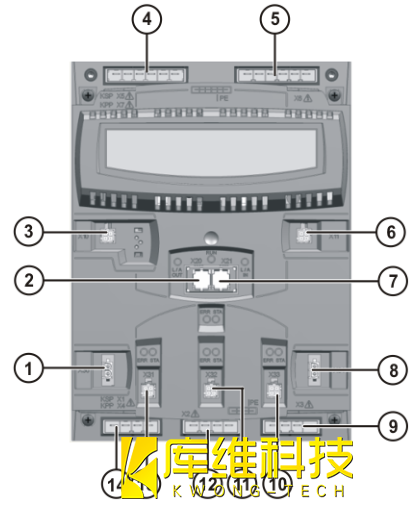
工業機器KRC4 KPP、KSP 的 LED 指示燈如下圖
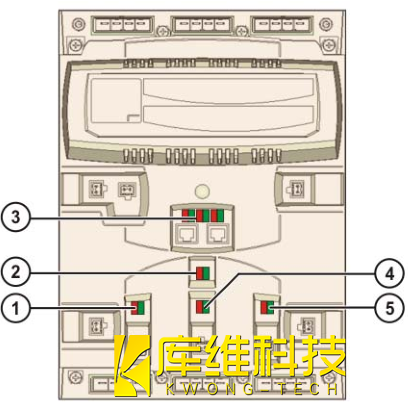
1 供電 LED 組
2 KPP 設備狀態 LED 組
3 驅動總線狀態 LED 組
4 軸調節器 LED 組
5 軸調節器 LED 組
供電 LED 組:
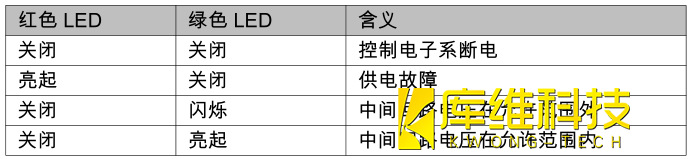
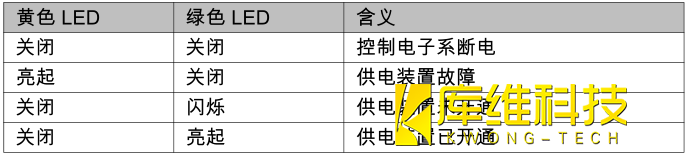
KPP 設備狀態 LED 組:

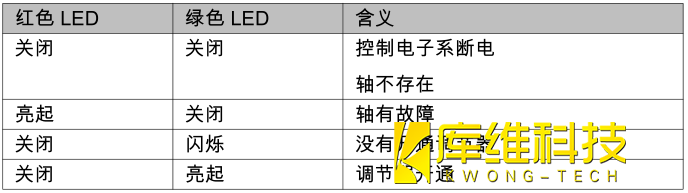
軸調節器 LED 組:
驅動總線狀態 LED 組:
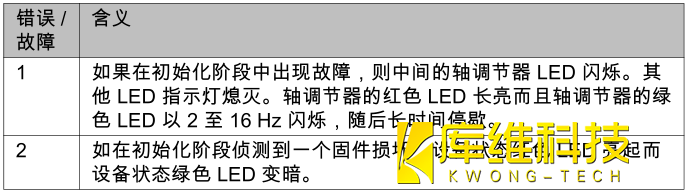
其他錯誤:
工業機器人更換零件時的安全:
1 機器人控制系統必須保持關機狀態,并具有可防意外重啟的保護措施.
注意:如果要在
機器人控制系統停止運行后立即進行拆卸,則必須考慮到散熱器表面溫度可能會導致燙傷. 請戴防護手套.
2 電源線已斷電.
警告:即使在主開關關斷時,白色導線也帶有電源電壓! 在接觸導線時此電源電壓可造成致命傷害.
3 按 工業機器人 ESD 準則開展工作.
4 等待 5 分鐘,直至中間回路完全放電.
警告:若將機器人控制系統關斷,下列部件仍可能在長達 5 分鐘的時間內帶電 (50 … 780 V):
1 KPP
2 KSP
3 中間回路連接電纜
此電壓可能導致生命危險.
KPP/KSP 的更換步驟:
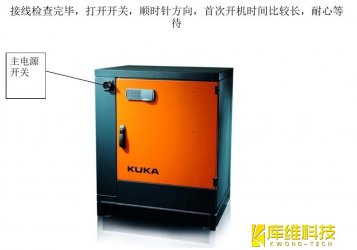
1. 將控制系統關機并采取措施防止其被意外重啟
2. 將數據線插頭 X20 和 X21 解鎖, 解除 KPP 上的所有連接.
3. 松開內六角螺絲 (1)
4. 將 KPP 略微向上抬起,頂部向前傾斜,將其從殼體支撐角鐵 (3)中向上取出
固定 KPP如下圖:
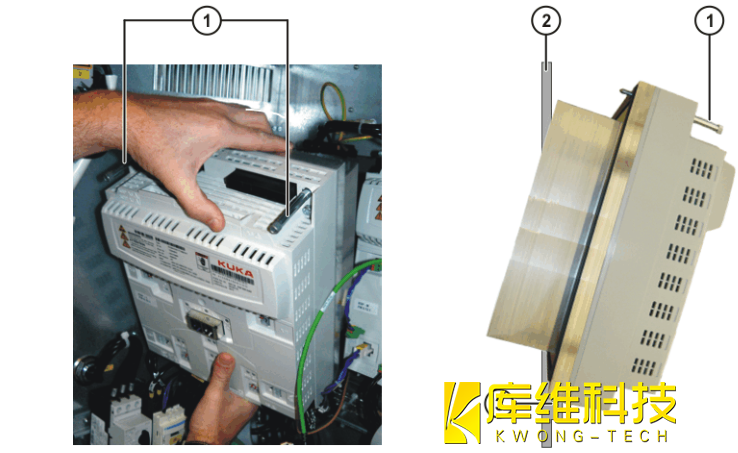
1 內六角螺栓 2 柜背板 3 殼體支撐角鐵
注意:KPP 的重量約為 10 kg. 在 KPP 的拆裝工作中存在擠傷危險!請戴防護手套5. 將新的 KPP 插進殼體支撐角鐵 (3)里,然后將其上部掛入角鐵并擰緊(擰緊扭矩 4 Nm)6. 按照插頭和線纜說明將所有接口插入. 將插頭 X20 和 X21 鎖緊.
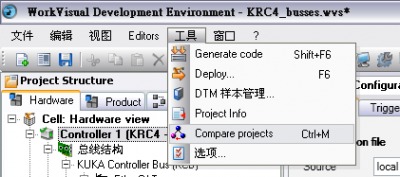
7. 如果因設備更換而進行了系統更改,則必須用 WorkVisual 配置
工業機器人的系統結構.
8. 實施功能測試