什么是工業機器人庫卡KRC4分解器及其工作原理
發布日期:2022-07-11 11:56 ????瀏覽量:
庫卡機器人KRC4分解器用于分析處理軸的當前位置,是一種旋轉式行程測量系統。
分解器如下圖:
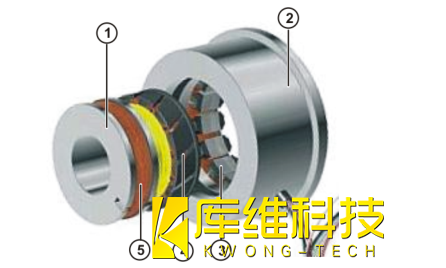

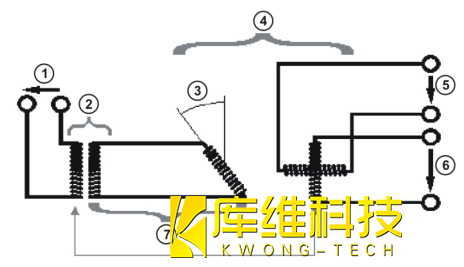
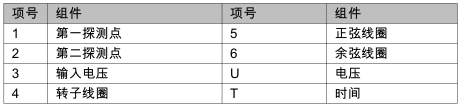
機器人分解器是按感應原理來運作的。
轉子 (3)通過旋轉式變壓器 (2)接受一個電壓裝置 (1)的供電 (頻率 =
8kHz)。 在定子線圈 (正弦線圈和余弦線圈; 5.6)內,通過感應引起與轉子
位置成比例的電壓。
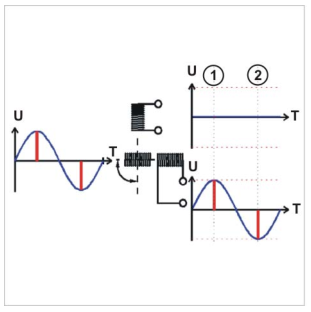
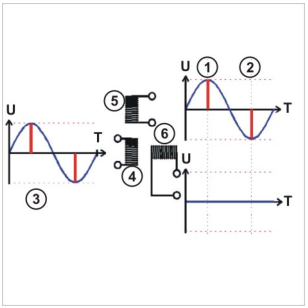
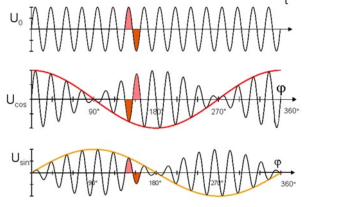
庫卡機器人分解器原理圖如下:

電壓隨著轉子的旋轉而變化。
感應引起的電壓在兩個測量點 (1,2)接受探測和評估。
庫卡機器人
分解器感應度 - 0 度如下圖:
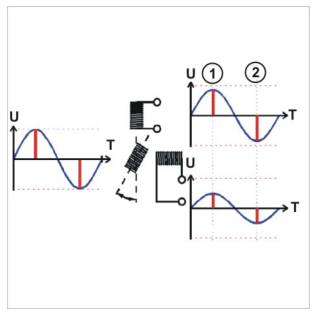
旋轉 30 度角時的分解器感應
機器人分解器感應度 - 30 度如下圖:
旋轉 90 度角時的分解器感應
旋轉 135 度角時的分解器感應
庫卡機器人分解器感應度 - 135 度如下圖:
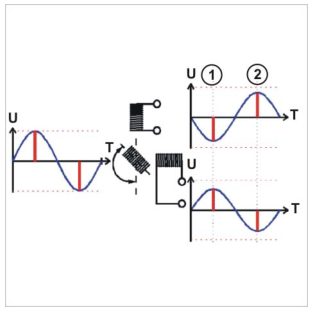
旋轉 180 度角時的分解器感應
庫卡機器人分解器感應度 - 180 度如下圖:
在庫卡采用的分解器中,各設有 3 個正弦線圈和余弦線圈。
這樣,電機每一圈機械式旋轉就等于分解器電旋轉 3x120 度角
庫卡機器人分解器轉數如下圖:
電旋轉一圈等于 65536 個增量 (16 比特)。
庫卡機器人
分解器每一圈機械式旋轉則等于 196608 個增量 (3*65536 增量)。
相關文章
工業機器人年產量達36.6萬臺

工業機器人可靠性評估標準有了國家標準
自動化焊接機器人常見3大故障及解決方法

我國穩居全球第一大工業機器人市場

多因素致短期業績承壓,工業機器人本體銷售高增長
庫卡工業機器人KRC4控制系統中什么叫傳送項目
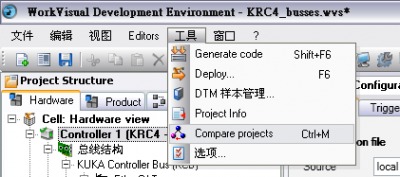
自動化生產線中庫卡工業機器人KRC4項目比較的處置方法
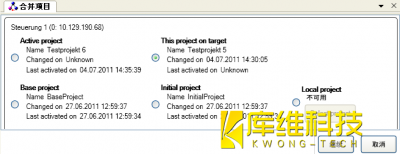
自動化生產線中庫卡工業機器人KRC4項目比較的原理

庫卡工業機器人KRC4 用 WorkVisual 加載項目的方法